
Integrating Autonomous Ocean Gliders as Sensor Platforms
Bringing together Research and Industry for the Development of Glider Environmental Services
BRIDGES (Bringing together Research and Industry for the Development of Glider Environmental Services) aims to develop an innovative glider platform to support further understanding, improved monitoring and responsible exploitation of the marine environment while assuring its long-term preservation. Factors such as robustness, cost-effectiveness, relocatability, versatility and easy deployment motivate the development of the intended ocean glider. This glider will support autonomous, long-term, in-situ exploration of the deep ocean at large spatio-temporal scales.
Special engineering challenges for the glider development comprise the adaptation of an existing glider platform (the sole European underwater glider SeaExplorer) to deep basins of up to 5000 m depth and a flexible payload architecture for increased autonomy and support of a broader range of sensing capabilities. To achieve the ability to execute unmanned underwater operations and to ensure an efficient integration of the collected observation data, one of the project’s dedicated work packages deals with interoperability and data infrastructure challenges.
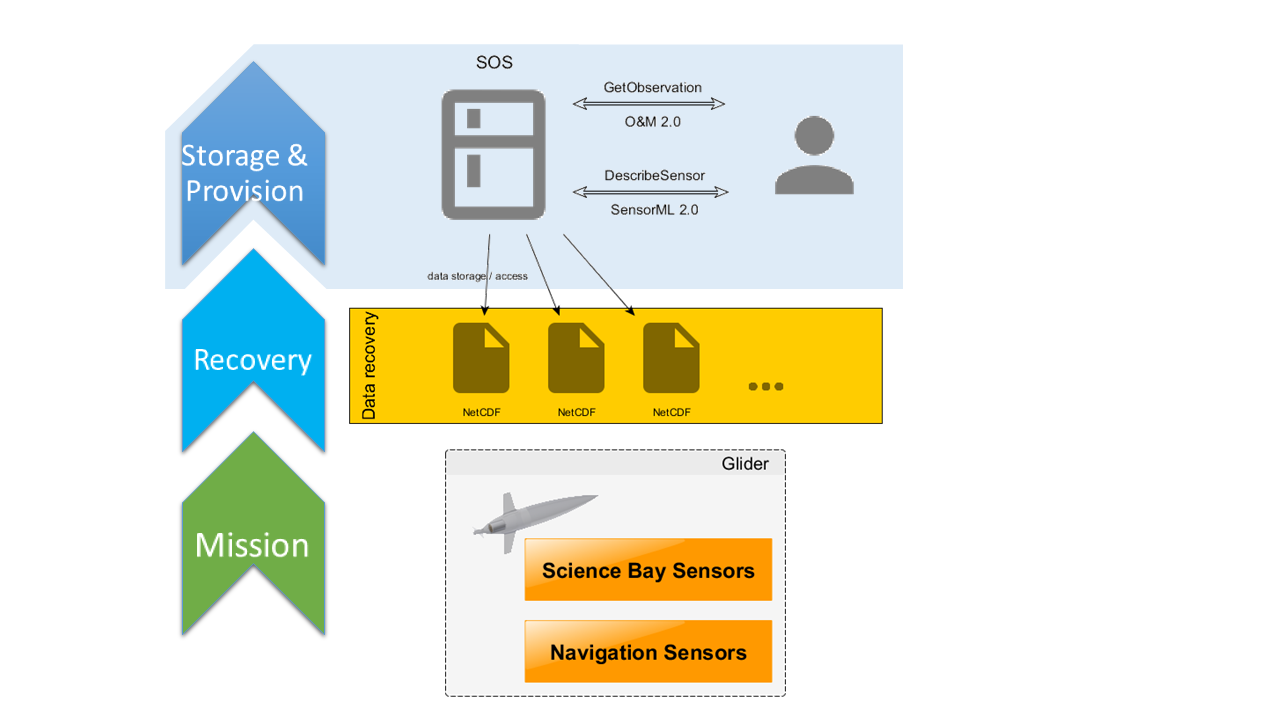
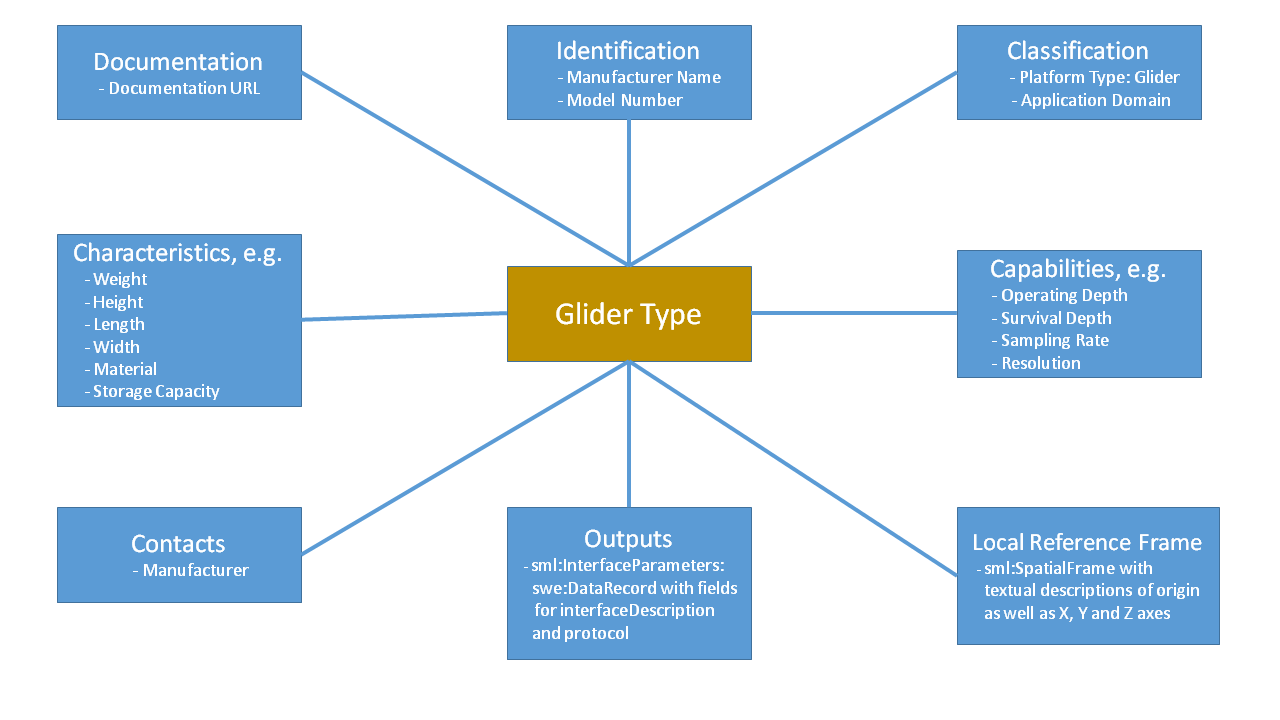
52°North was responsible for the design and standardization of a Web-based architecture for integrating autonomous ocean gliders deployed as sensor platforms. A major contribution was the specification and design of a Sensor Web infrastructure that is especially tailored to the needs of marine gliders and researchers working with the collected data. In addition to the definition of corresponding metadata profiles, 52°North contributes (in close cooperation with the British Oceanographic Data Centre that operates a comprehensive vocabulary server) approaches for improving semantic interoperability and the enablement of event-based data flows.
In 2019, 52°North focused on updating the designed software concepts and architectures. In particular, a revised version of the architecture concept was finalized as the project deliverable D3.4 “Interface standards for applications of deep and ultra-deep glider”. The concept was presented at the AGILE 2019 conference and published as a conference paper.
Project Partners
